
Lär dig mer om laserscanner
Publicerat:2025-02-24 | Jörgen CarlswärdLaserscanners är en osynlig väktare som skyddar både människor och maskiner i industriella miljöer. Genom att skapa exakta övervakningszoner med hjälp av infrarött ljus och avancerad teknik säkerställs att riskfyllda områden förblir trygga. Dessa innovativa lösningar bidrar till effektivare produktion och ökad säkerhet, samtidigt som de uppfyller moderna krav på maskinsäkerhet.
Kunskap
Vad är en laserscanner?
En laserscanner är en optisk sensor som skannar omgivningen i två dimensioner med hjälp av infraröda laserstrålar. En laserscanner används för att övervaka farliga områden på maskiner eller fordon.
Hur fungerar det?
Våra laserscannrar fungerar med principen av ”time-of-flight”-mätning. De sänder ut mycket korta pulser av infrarött ljus samtidigt som ett elektroniskt stoppur startas. När ljuset träffar ett föremål reflekteras det tillbaka till laserscannern. Genom att mäta tiden mellan sändning och mottagning beräknar laserscannern avståndet till objektet.
I laserscannern finns det också en spegel som roterar med konstant hastighet som avböjer ljuspulserna så att de täcker en båge av t.ex. 270°. På detta sätt kan ett objekt detekteras i det skyddande området inom t.ex. 270°. Den första strålen av en avsökning startar vid -45° i förhållande till den bakre delen av scannern.
Laserscannern skickar en puls av ljus med en vinkelupplösning 0,5° vilket ger upplösningar mellan 30 mm och 150 mm.
När en ljusstråle bryts ges en dubblerad stoppsignal till de farliga maskinerna eller fordonet i skyddsområdet.
Den dubblerade stoppsignalen består av två var för sig OSSD (Output Signal Switch Device), alltså två felsäkra utgångar 24 V DC som är pulserande vilket innebär att utgångarna är kortslutningsövervakade.


Fördelar med laserscanner
Tack vare laserscannerns princip med aktiv scanning behöver inte laserscannern mottagare eller reflektorer vilket ger följande fördelar:
 Reducerad installationstid
Reducerad installationstid
Man kan enkelt anpassa det övervakade området till det farliga området vid en maskin
I jämförelse med en säkerhetsmatta är en laserscanner nästan outslitlig
Då används laserscanner
Då man behöver avsäkra riskområden och där mekaniska skydd är opraktiska, ergonomiskt oriktiga eller där det är svårt att täcka av med mattor eller ljusstråleskydd, är en laserscanner ett bra och ekonomiskt alternativ. Med en laserscanner går det att skräddarsy ett avkänningsområde precis så att det passar i varje applikation.
Olika säkerhetsfunktioner hos laserscannern
EDM = External Device Monitoring
Innebär extern kontaktorövervakning. 1 NC-kontakt från kontaktorn kopplas in via 24 V till en separat ingång på laserscannern som gör att laserscannern inte går att återställa om en eller flera kontaktorer har hängt sig.Multiple sampling
Med ”multiple sampling” menas hur många gånger ett objekt måste scannas innan utgångarna faller. Med ”multiple sampling” 3 innebär det att ett objekt måste scannas tre gånger innan utgångarna faller. På så sätt kan man skräddarsy sin applikation och undvika driftstörningar på grund av att det flyger in mindre föremål i fältet t.ex. svetsloppor.
Laserscannern är alltid inställd på minimum 2 ”multiple sampling”. Från ”multiple sampling” 3 måste man lägga till ett värde på reaktionstiden. Tilläggsvärdet beror på reaktionstiden och ”multiple sampling”.
”Contour as a reference”
Funktion som innebär att scannern övervakar vissa delar av säkerhetszonen. T.ex. så bryter scannern om den flyttas eller om det sker förändringar i säkerhetszonen. ”Contour as a reference” måste alltid användas då laserscannern monteras vertikalt.
Manuell startfunktion
När en laserscanner bryts ges stoppsignal till farliga maskiner inom riskområdet och en återställningslampa tänds. För ny start av maskinen måste laserscannern först återställas.
Detta görs med en återställningsknapp som måste placeras så att den inte kan nås inifrån det område som skyddas.
Det ställs stora krav på återställningsfunktionen. Det vill säga varken kortslutning eller komponentfel får ge automatisk återställning.
När återställningsknappen har påverkats aktiveras utgångarna och återställningslampan släcks.
Obs! Återställning av laserscannern ska bara göra det möjligt för återstart av maskinen.
Applikationsexempel
Nedan följer några exempel på användningsområden med laserscanner.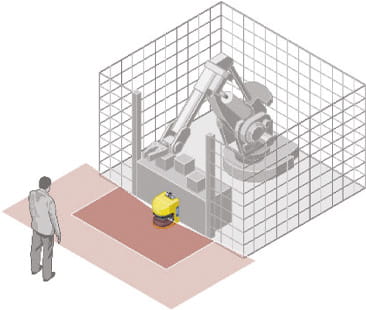
1. Horisontell montering med ett övervakningsfält
Det är möjligt att konfigurera en varningszon och en säkerhetszon framför en maskin för att skydda personer från att komma in i farligt område. Varningszonen kan aktivera en varningslampa eller en ljudsignal och på så sätt förhindra ofrivilliga stopp. Säkerhetszonen utlöser omedelbart skyddsstopp och stoppar maskinen.
2. Horisontell montering med två övervakningsfält
Laserscannern kan programmeras att ha två olika programmerade zoner med var för sig en alarmzon och en säkerhetszon.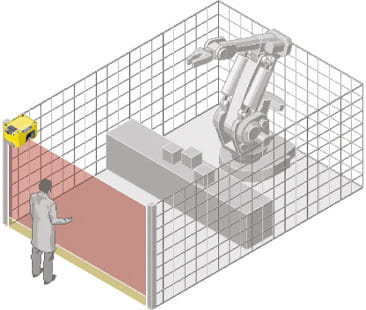
3. Vertikal montering med ett övervakningsfält
Laserscannern kan monteras så att man kan konfigurera en vertikal säkerhetszon för att skydda personer från att komma in i farligt område. När man använder scannern för vertikal övervakning måste man alltid aktivera funktionen ”contour as a reference” vilket innebär att scannern övervakar vissa delar av säkerhetszonen. T.ex. så bryter scannern om den flyttas eller om det sker förändringar i säkerhetszonen.

4. Vertikal montering med två övervakningsfält
Laserscannern kan monteras så att man kan konfigurera en eller två vertikala säkerhetszoner i samma plan för att skydda personer från att komma in i farligt område. När man använder scannern för vertikal övervakning måste man alltid aktivera funktionen ”contour as a reference” vilket innebär att scannern övervakar vissa delar av säkerhetszonen. T.ex. så bryter scannern om den flyttas eller om det sker förändringar i säkerhetszonen.
5. Förarlösa vagnar (AGV)
Laserscannern monteras med fördel i fronten på förarlösa vagnar. Varningszonen kan användas för att sakta ner farten på vagnen alt. aktivera en varningslampa eller en ljudsignal. Säkerhetszonen ger sedan stoppsignal om någon/något kommer för nära.Beräkning av skyddsavstånd enligt SS-EN ISO 13855:2010
Nedanstående formler ger en bra vägledning för beräkning av skyddsavstånd.
Tänk på att man alltid måste beakta möjligheten att kringgå elektriskt avkännande skyddsanordning genom att sträcka sig över skyddsfältet. För mer information angående detta kontakta OEM Automatic, produktområde Sensor & Maskinsäkerhet.
Horisontellt monterat skyddsfält
S = (K x (TM + TS)) + ZG + ZR + C
K = Kroppens hastighet 1 600 mm/s enl. SS-EN ISO 13855:2010
TM = Stopptid på maskin/system (s)
TS = Reaktionstid på laserscanner (s)
ZG = Generellt säkerhetstillägg = 100 mm
ZR* = Tillägg för ev. fel som uppkommer i samband med reflektion*
C = Tillägg för att undvika risk att nå över säkerhetszonen
Reaktionstid laserscanner:
Den totala reaktionstiden på laserscannern beror på:
- Vald upplösning och säkerhetsfält
- Multiple sampling
| Beräkning av den totala reaktionstiden TS | |||
|---|---|---|---|
| TS = t B + TMFA | |||
| tB = Reaktionstid | Se respektive laserscanner | ||
| TMFA = Tillägg med hänsyn till "multiple sampling" >2 | Se respektive laserscanner |
* ZROm risk för reflektion finns mindre än 1 m från säkerhetszonens ytterkant läggs 200 mm till.
Uträkning av C
Om det finns tillräckligt med utrymme framför maskinen använd 1 200 mm.
Om säkerhetsavståndet skall vara så litet som möjligt räknas C ut enl. följande: C = 1 200 mm - (0,4xHD)
HD = Avkänningsfältets placering i förhållande till golvplanet.
OBS! Minsta tillägg för att nå över säkerhetszonen är 850 mm (armens längd).

Vertikalt monterat skyddsfält för kroppsskydd
S = K x (TM + TS) + C
K = Kroppens hastighet 1 600 mm/s enl. SS-EN ISO 13855:2010
TM = Stopptid på maskin/system (s)
TS = Reaktionstid på laserscanner (s)
C = Tillägg för att undvika risk att nå över säkerhetszonen (850 mm)
Reaktionstid laserscanner:
Den totala reaktionstiden på laserscannern beror på:
- Vald upplösning och säkerhetsfält
- Multiple sampling
| Beräkning av den totala reaktionstiden TS | |||
|---|---|---|---|
| TS = t B + TMFA | |||
| tB = Reaktionstid | Se respektive laserscanner | ||
| TMFA = Tillägg med hänsyn till "multiple sampling" >2 | Se respektive laserscanner |
| Beräkning av skyddsavstånd för kroppsskydd | Upplösning laserscanner mm | ||
|---|---|---|---|
| 1 600 x (t1+t2) + 850 | 50 | ||
| 1 600 x (t1+t2) + 850 | 70 | ||
| 1 600 x (t1+t2) + 850 | 150 | ||
| * Skyddsavståndstillägg C = 850 mm som anses vara normal räckvidd för en arm. |
Exempel:
Laserscanner med upplösning 30 mm
TS (stopptiden för laserscannern) = 0,025 s
TM (maskinens stopptid) = 0,05 s
T (total stopptid t1+t2) = 0,025 + 0,05 = 0,075 s
S = 2 000 x 0,075 + 128
S = 278 mm
OBS! Om det finns risk att nå riskområdet genom att sträcka sig över, under eller från sidan av laserscannerns skyddsfält måste man komplettera med t.ex. mekaniska skydd. För mer information angående detta kontakta OEM Automatic, produktområde Säkerhet.

Vertikalt monterat skyddsfält för relevant kroppsdel
S = 2 000 x (TM + TS) + 8(d-14)
K = Rörelsehastighet hos relevant kroppsdel 2 000 mm/s enl. SS-EN ISO 13855:2010
TM = Stopptid på maskin/system (s)
TS = Reaktionstid på laserscanner (s)
d = Laserscannerns upplösning
Reaktionstid laserscanner:
Den totala reaktionstiden på laserscannern beror på:
- Vald upplösning och säkerhetsfält.
- Multiple sampling
| Beräkning av den totala reaktionstiden TS | |||
|---|---|---|---|
| TS = t B + TMFA | |||
| tB = Reaktionstid | Se respektive laserscanner | ||
| TMFA = Tillägg med hänsyn till "multiple sampling" >2 | Se respektive laserscanner |
Beräkning av skyddsavstånd S för handskydd
Nedan formel gäller:
- För alla värden på S upp t.o.m. 500 mm.
- Minsta tillåtna värde för S ska vara 100 mm
| Beräkning av skyddsavstånd S för relevant kroppsdel | Upplösning laserscanner mm | ||
|---|---|---|---|
| 2 000 x (t1+t2) + 128* | 30 |
||
| 2 000 x (t1+t2) + 208* | 40 | ||
|
* Skyddsavståndstillägg C d.v.s. laserscannerns upplösning beräknas enligt formel, 8 x upplösning - 14 mm. För t.ex. upplösning 30 mm gäller C=8(30-14) = 128 mm. |
Om värdena för S med ovan formel blir större än 500 mm kan nedan formel användas.
I detta fall skall minsta tillåtna värde för S vara 500 mm.
| Formel | Upplösning av laserscanner mm. | ||
|---|---|---|---|
| 1 600 x (t1+t2) + 128* | 30 | ||
| 1 600 x (t1+t2) + 208* | 40 | ||
| *Skyddsavståndstillägg C d.v.s. laserscannerns upplösning beräknas enligt formel, 8 x upplösning - 14 mm. För t.ex. upplösning 30 mm gäller C=8(30-14) = 128 mm. |

Kolla in vårt sortiment





